
Simplifying Agreement: Language Support for Consensus
by Devashish Purandare · edited by Aldrin Montana and Lindsey Kuper
In my last post, we explored consensus mechanisms and why it is so hard to get them right. Implementing consensus and other distributed protocols often requires implementing a lot of supporting functionality, resulting in long and complex code. This makes it hard to verify whether the implemented protocol is true to its formal definition. The “Paxos Made Moderately Complex” implementation may be only 451 lines of Python code, but implementations used in state-of-the-art systems are much more complex. Popular Paxos and Raft implementations run into the thousands of lines of code. As the authors of “Paxos Made Live” point out:
While Paxos can be described with a page of pseudo-code, our complete implementation contains several thousand lines of C++ code. The blow-up is not due simply to the fact that we used C++ instead of pseudo notation, nor because our code style may have been verbose. Converting the algorithm into a practical, production-ready system involved implementing many features and optimizations – some published in the literature and some not.
When using a general-purpose programming language to implement Paxos, then, we seem to have two options:
- We can use a higher-level language like Python; such an implementation may be concise and relatively easy to understand, but not suitable for scalability and high performance.
- Alternatively, we can use a lower-level language, such as C++, and write a scalable, high-performance implementation that is verbose and hard to understand.
Is there any way to have both high performance and ease of programmability? Domain-specific languages (DSLs) promise a way to have both programmability and performance by trading off generality – so let’s see how well that works!
In this blog post I plan to explore a special class of domain-specific languages (DSLs) that have been designed for implementing consensus protocols.
Domain-Specific Languages for Distributed Systems
Programming distributed systems requires complex reasoning about the timing and order of messages sent and received, synchronization conditions, and other distributed-systems-specific concepts. In general-purpose programming languages, it is hard to implement distributed algorithms while maintaining simplicity.
Various DSLs intended for implementing distributed algorithms – especially consensus algorithms – have been proposed, such as DistAlgo, Bloom, Overlog, and PSync. In this post we will do a deep dive into one of these: DistAlgo.
DistAlgo
You might remember the infamous abstract from “Paxos Made Simple”: “The Paxos algorithm, when presented in plain English, is very simple.” Yet, as we’ve seen, implementing Paxos in practice is not so simple. Some of the difficulty in trying to convert English pseudo-code into running code comes from the fact that the programming language we are using is not especially suited for expressing consensus protocols.
A New Hope
What if we could express distributed protocols in working code as easily as they are stated in pseudo-code? This is where DistAlgo comes in! DistAlgo is a programming language that emphasizes the ability to clearly describe distributed algorithms. Prototyped in Python, DistAlgo was built specifically to address the lack of support in general-purpose programming languages for expressing constructs required for distributed algorithms.
The DistAlgo team has implemented a variety of distributed algorithms to showcase their language’s ability to express these algorithms in running code, which can then be optimized, tested, and even formally verified.
Paxos in DistAlgo
In “Moderately Complex Paxos Made Simple,” the creators of DistAlgo discuss implementing a version of Paxos in DistAlgo. The paper is an excellent read, not only for the implementation of Paxos that they walk the reader through, but also the insight they offer on what makes Paxos so hard to understand and implement. For instance, Lamport’s prose description of Paxos in the “Paxos Made Simple” paper involves the notion of a “promise”, and the authors of “Moderately Complex Paxos Made Simple” devote some effort to making this notion precise, commenting:
Indeed, this is the hardest part for understanding Paxos, because understanding an earlier phase requires understanding a later phase, which requires understanding the earlier phases.
The cyclic nature of the definition of the Paxos protocol is the cause of a lot of the confusion surrounding it, and that’s where Raft diverges from Paxos in its effort to simplify consensus. (Although, as mentioned in my previous post, it is an open question whether Raft succeeds in doing that.)
DistAlgo’s Superpowers!
DistAlgo supports the notion of a process, which presents interfaces for initialization
(setup), code execution (run), and handling of received messages (receive).
yield makes the process allow handling of unhandled messages, and await
allows timeouts. Queries on message histories are divided into comprehensions, aggregations, and quantifications over sets.
This allows an easy implementation of simple Paxos, using just 72 lines of code. The DistAlgo implementation can be compiled to Python or run directly. The authors also argue that the high-level nature of the DistAlgo code allows easy translation to TLA+ for subsequent verification.
Moderately Complex Paxos Made Simple
The authors implement the version of Paxos we saw in Paxos Made Moderately Complex, the version with slots and scouts and commanders! Unlike the original paper, though, they encapsulate the functionality of commanders and scouts back into the leader to allow simpler code. The split in the original paper seemed unnecessary from a correctness point of view; this assigns their actions to the leader.
The implementation ends up being about 100 lines of code in DistAlgo, and 300 in Python. While this is smaller than the 450-line Python implementation of the original, it also reduces or repackages some functionality.
In DistAlgo, it is trivial to implement an optimization which keeps just the maximum numbered ballot for each slot. The paper shows how this can be achieved by changing just one line of the code:
accepted := {(b,s,c): received (’2a’,b,s,c)}
to
accepted := {(b,s,c): received (’2a’,b,s,c), b = max {b: received (’2a’,b,=s,_)}}
This will pick the maximum ballot for each slot instead of keeping every ballot.
They also implement leader leases with timeout, similar optimization to the Google paper to prevent unnecessary contention because of multiple readers.
The authors also manually translate the DistAlgo code into TLA+ and mechanically verify the TLA+ specification using TLAPS, discovering and correcting a safety violation in the original “Paxos Made Moderately Complex” pseudo-code which may cause preempt messages to never be delivered to the leaders.
Although initially enticed by the idea of implementing Paxos in DistAlgo, I am not sure DistAlgo achieves what it sets out to do. It doesn’t save a lot on the size of the code, and while the code complexity is reduced, the original code for “Paxos Made Moderately Complex” was not very complex to begin with. What is somewhat disappointing is that both resort to Python in the end, in a prototype which is not practical or useful to the systems community and is limited by Python’s limited support for multi-core processing. For now, it offers us a relatively simple-to-write implementation of Multi-Paxos that is presumably easy to manually convert to a TLA+ specification, but at least for the current stage of the prototype, it fails to deliver on practical applicability.
Raft in DistAlgo
Although the DistAlgo developers have an implementation of Raft in the “examples” directory of their GitHub repo, Raft isn’t described in any of their papers.
This makes it unclear if the committed example is indeed complete or correct. Nevertheless I dived into the specification code, so we can check for ourselves.
Testing the implementation was harder than expected. The pip module fails
installation, and the setup.py stops with an error. Whatever is working for the
authors doesn’t seem to work for me. I checked with a fresh uncorrupted Python
virtualenv just to make sure, but it fails with similar issues. Thankfully,
the authors also provide binaries with the distribution, which seem to work.
Executing the Raft code spits out a wall of text that is the log messages produced by an example run of the protocol:
> ./dar ../da/examples/raft/orig.da
../da/examples/raft/orig.da compiled with 0 errors and 0 warnings.
[369] da.api<MainProcess>:INFO: <Node_:b2c01> initialized at 127.0.0.1:(UdpTransport=45231, TcpTransport=41250).
[369] da.api<MainProcess>:INFO: Starting program <module 'orig' from '../da/examples/raft/orig.da'>...
[370] da.api<MainProcess>:INFO: Running iteration 1 ...
[370] da.api<MainProcess>:INFO: Waiting for remaining child processes to terminate...(Press "Ctrl-C" to force kill)
[2542] orig.Server<Server:17c06>:OUTPUT: Heartbeat timeout, transitioning to Candidate state.
[2549] orig.Server<Server:17c06>:OUTPUT: Transitioning to Leader.
[3898] orig.Server<Server:17c06>:OUTPUT: LogEntry:1:<Client:17c09>:0 at index 1 applied to state machine.
[3899] orig.Client<Client:17c09>:OUTPUT: Request 1 complete.
[3899] orig.Server<Server:17c06>:OUTPUT: LogEntry:1:<Client:17c08>:0 at index 2 applied to state machine.
[3900] orig.Client<Client:17c08>:OUTPUT: Request 1 complete.
[3901] orig.Server<Server:17c05>:OUTPUT: LogEntry:1:<Client:17c09>:0 at index 1 applied to state machine.
[3901] orig.Server<Server:17c03>:OUTPUT: LogEntry:1:<Client:17c09>:0 at index 1 applied to state machine.
[3901] orig.Server<Server:17c06>:OUTPUT: LogEntry:1:<Client:17c07>:0 at index 3 applied to state machine.
[3902] orig.Client<Client:17c07>:OUTPUT: Request 1 complete.
.
.
.
.
[6923] orig.Client<Client:17c07>:OUTPUT: Request 3 complete.
[6926] orig.Server<Server:17c04>:OUTPUT: LogEntry:1:<Client:17c07>:2 at index 9 applied to state machine.
[6927] orig.Server<Server:17c02>:OUTPUT: LogEntry:1:<Client:17c07>:2 at index 9 applied to state machine.
[6926] orig.Node_<Node_:b2c01>:OUTPUT: All clients done.
[6929] orig.Server<Server:17c05>:OUTPUT: LogEntry:1:<Client:17c07>:2 at index 9 applied to state machine.
[6929] orig.Server<Server:17c03>:OUTPUT: LogEntry:1:<Client:17c07>:2 at index 9 applied to state machine.
[6929] da.api<MainProcess>:INFO: Main process terminated.
Curious as to what it was doing, I profiled the execution in the instruments provided by Xcode.
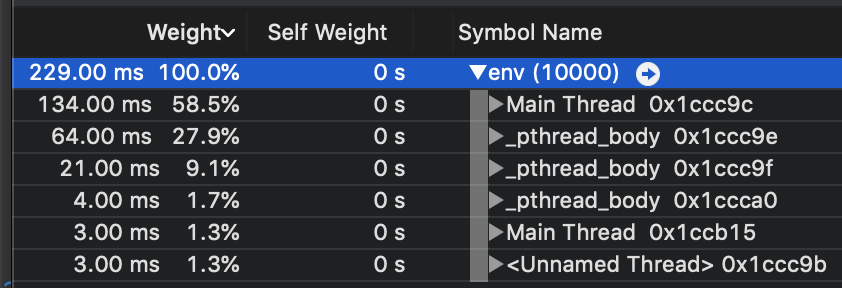
The process spawns three threads (processes in an instance of Raft) and tries the leader election protocol between them. In the execution, we can see the distribution of work between threads, with more weight associated with more work, the particular leader of that round. The Raft process updates state machines with the committed entries.
Sadly, the comments do not tell us anything about the code and the execution. At best it seems to be a proof of concept that Raft could be implemented in DistAlgo. One interesting thing is that the implementation ends up being ~240 lines of code, with the expanded Python being around 360 lines. This is in contrast to the much shorter ~100-line implementations of the Paxos protocols. It is not completely clear why the Raft implementation is so much longer, but based on my interpretation of the code, the leader election code and changes to allow support for “idle mode” increase the length of the code. The code also combines several checks into single conditions, resulting in dense code like:
if await(currentRole is not Leader):
return
elif some(n in range(len(log) - 1),
has= (n > commitIndex and
len(setof(i, i in matchIndex, matchIndex[i] >= n)) >
len(peers) / 2 and
log[n].term == currentTerm)):
debug("Updating commitIndex from %d to %d" % (commitIndex, n))
commitIndex = n
# Idle timeout is half of normal term timeout:
elif timeout(termTimeout/2):
debug("Idle timeout triggered.")
has_idled = True
Closing Thoughts
When I started writing this post, the area of DSLs for distributed systems seemed very promising. However, the state of the art turns out to be a bit demoralizing. The DSLs mentioned in this post include fascinating ideas that could change how we program distributed systems, but all of them are buggy and incomplete prototypes. None of the languages mentioned at the start of this post have advanced beyond the proof-of-concept stage.
If you want to use consensus in your system today, it would be better to go with battle-tested implementations in general-purpose languages, as verbose and complex as they might be. We need more researchers to look into the space of performance- and scalability-oriented DSLs for expressing distributed algorithms, and I hope the projects discussed in this post mature beyond the prototype stage and become strong contenders.